 |
| GRÚAS PICO-PATO (Página 3 de 5) |
| |
|
| |
|
| Mecanismo de elevación |
| |
Los componentes principales del mecanismo de elevación son:

1. Cabrestante Hidráulico
2. Conjunto de poleas
3. Conjunto de trócola y gancho |
 |
| |
| El cable de elevación acciona la trócola, desde donde se suspende la carga, pasando a través de las poleas situadas en los extremos del pico. Para garantizar que el cable no salte de las poleas, se guía a lo largo de su recorrido por la estructura oscilante, terminando a las poleas extremas, guiando los cables de la trócola. |
| |
 La Trócola está formada por dos poleas de acero, girando sobre rodamientos, y van unidas al gancho giratorio por dos gualderas de gruesas chapas de acero. Para el correcto enrollamiento del cable es necesario que la trócola tenga un peso suficiente que mantenga el cable en tensión. La Trócola está formada por dos poleas de acero, girando sobre rodamientos, y van unidas al gancho giratorio por dos gualderas de gruesas chapas de acero. Para el correcto enrollamiento del cable es necesario que la trócola tenga un peso suficiente que mantenga el cable en tensión.
Para la elevación de la carga se dispone un cabrestante hidráulico especialmente diseñado y universalmente utilizado en las grúas automóviles. Tiene una estructura cuadrada para poder fijarla por cualquiera de sus cuatro costados. Contiene el tambor de enrollamiento del cable en multicapa. Es accionado por un reductor planetario solidario al tambor por la parte móvil y al bastidor por la fija. Termina apoyándose el otro extremo al bastidor a través de un rodamiento. |
| |
| |
|
| Mecanismo de giro |
| |
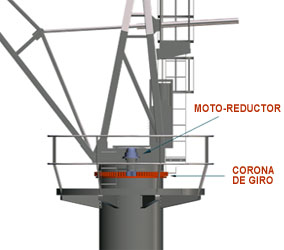 El movimiento de giro se consigue mediante un grupo moto-reductor fijado en el lateral del castillete y una corona dentada fija en la parte superior del pivote. El movimiento de giro se consigue mediante un grupo moto-reductor fijado en el lateral del castillete y una corona dentada fija en la parte superior del pivote.
Éste dispositivo permite un giro de 360º controlado por la botonera de mando.
Este mecanismo además de hacer girar la superestructura de la grúa, debe controlar el momento de vuelco debido a la excentricidad de la carga y peso propios.
Dispone para dicho fin de dos elementos: RODAMIENTOS DE GIRO y MOTORREDUCTOR. |
| |
| |
|
| Mecanismo de cambio de alcance |
| |

El conjunto articulado de la pluma retráctil formado por las tres estructuras ya mencionadas, pluma, tensor y pico, es movido por medio de un cilindro hidráulico para variar el alcance de la grúa.
El movimiento de cambio de alcance, al igual que el resto de movimientos que caracterizan este modelo de grúa, se realiza mediante manipuladores progresivos y electroválvulas proporcionales dotando a la grúa de movimientos con velocidad variable y controlada. |
| |
| |
|
| |
