 |
| MARINA CRANE (Pages 3 to 5) |
| |
|
| |
|
| Elevation system |
| |
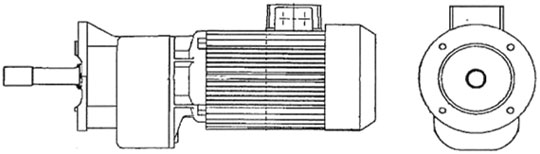
The elevation system comprises a compact winch with the following mechanisms:
Motor-brake
The elevating motor is an asynchronous, three-phase motor with a conical rotor that incorporates a sliding brake. There is an option of dual polarity motors to provide a second speed of approximation with heat sensors. The brake is mechanical and doesn’t need any electrical components. It works automatically when the motor tension stops.
Reducer
This is a planetary reducer – its planets are adjusted and mechanised with great precision, and the whole system is mounted in a robust steel casing. Its calculations and dimensions ensure its durability. |
| |
 |
| |
 Coupling Coupling
The joint between the motor and the reducer comprises an elastic coupling that can withstand a great number of starts and brakes, and cushions the strains of the motor starting and stopping.
Cable Guide
This comprises sections that ensure the cable is rolled and unrolled precisely, allowing cable deviation of +3.5o.
Cut-off switch
As well as a mechanism for stopping elevation and descent, the cut-off switch is also a safety mechanism in the event of emergencies.
|
 Load limiter Load limiter
This is an electro-mechanical system that has been set up in such a way as to ensure minimal loss of height for the hoist. |
| |
| |
|
| Turning system |
| |
 The mechanism that allows the boom to swing comprises a combined bearing on top of the pivot, between the pivot and the turret. It controls the vertical strains of its own weight and that of the load, and one of the horizontal components created by the load’s unbalancing momentum. The mechanism that allows the boom to swing comprises a combined bearing on top of the pivot, between the pivot and the turret. It controls the vertical strains of its own weight and that of the load, and one of the horizontal components created by the load’s unbalancing momentum.
The other horizontal component, opposite to those previously mentioned, is absorbed by the turning cart rollers inside the O-ring that is located beneath the turret.
|

The turning motion is achieved by a gearbox that is fixed to one side of the turret, and its axis has a cog that is attached the main sprocket, which is welded to the pivot. |
| |
| |
| |
|
